Recension : Motor Control: Projects with Arduino & Raspberry Pi ZeroW
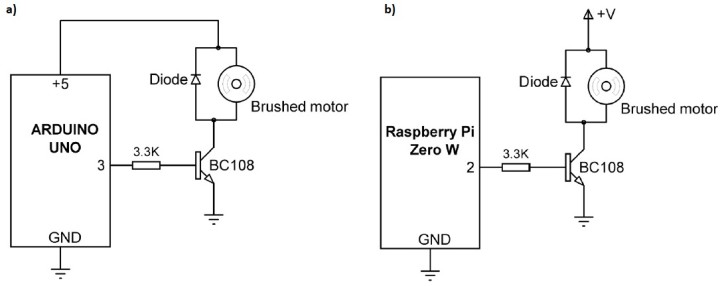
Le premier projet, par exemple, décrit un moteur à courant continu avec balais, fonctionnant entre 3 et 6 V, connecté à un microcontrôleur via un circuit d'attaque à transistor. Le moteur tourne pendant 10 s, puis s’arrête 5 s, et le processus se répète jusqu'à ce que vous l'interrompiez. Les autres projets sont sensiblement plus compliqués, mais l'auteur a veillé, dans la mesure du possible, à simplifier les aspects techniques. Pour prendre un exemple, la commande en modulation de largeur d'impulsion (PWM) est assortie d'une illustration claire du rapport cyclique de l'onde de modulation et utilise des équations simplifiées pour en expliquer les principes essentiels.
Schémas de circuit du premier projet utilisant (a) un Arduino Uno et (b) un Raspberry Pi Zero W.
Suite au chapitre 2, consacré à des projets de commande de moteur à courant continu relativement simples, l'ouvrage aborde les applications de moteur pas à pas au chapitre 3, et les projets de servomoteurs au chapitre 4. L'une des applications les plus intéressantes est un robot capable d'éviter les obstacles. Il est muni d'un module de capteur à ultrasons pour détecter la distance entre le robot et les objets proches. Selon l'auteur, « si la distance par rapport à l'objet est de 50 cm ou moins, le robot effectue une rotation vers la gauche jusqu'à ce qu'il trouve un espace libre dans un périmètre de 50 cm, et progresse ensuite vers l'avant ». Pour développer un projet similaire, n'hésitez pas à reprendre le code d'excellente qualité figurant au chapitre 2.
Veuillez saisir votre adresse électronique. Les instructions de réinitialisation de votre mot de passe vous seront immédiatement envoyées par courriel.

Discussion (0 commentaire(s))