
Pas pour les mauviettes - kit bras robotique 6-DOF de Makerfabs avec Raspberry Pi Pico
sur

Qu'est-ce que c'est ?
Le bras robotique 6 DOF avec Raspberry Pi Pico est un bras robotique contrôlé par une carte microcontrôleur Raspberry Pi Pico. DOF est l'abréviation de Degree(s) of Freedom (Degré(s) de Liberté), ce qui, dans le cas d'un bras robotique, correspond à une articulation. Le bras examiné ici en possède six, ce qui lui permet de se déplacer à six endroits différents, indépendamment des autres. Chaque DOF correspond à un servo.
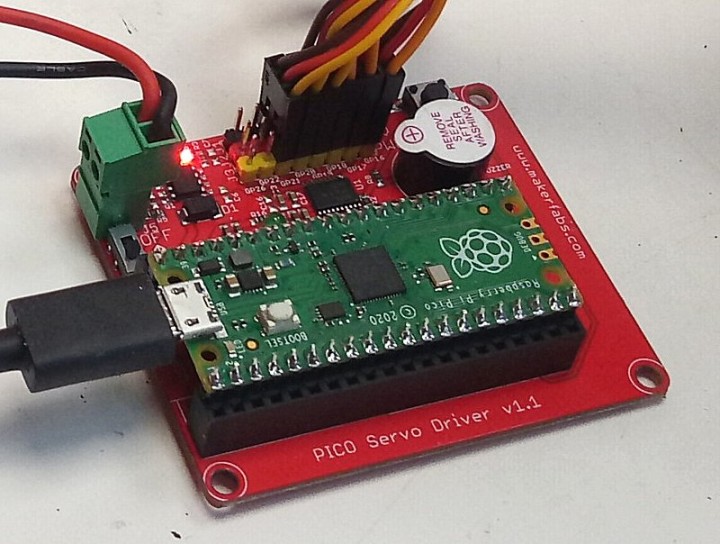
Le bras est contrôlé par une carte Raspberry Pi Pico montée sur une petite carte d'extension qui fournit les connexions aux servos, l'alimentation électrique, un buzzer et un bouton poussoir. Le Pico, ou plutôt le MCU RP2040 qu'il contient, est destiné à être programmé en MicroPython, mais ce n'est bien sûr pas une obligation. Cependant, le pilote et les exemples sont écrits en MicroPython.
Tout est inclus
Le bras robotique est livré sous la forme d'un kit complet. En dehors d'un ordinateur sur lequel effectuer la programmation et d'un câble micro-USB, rien d'autre n'est nécessaire. Une alimentation de 5 VCC, 6 A est incluse. Un cordon d'alimentation est également fourni, mais avec une fiche de type américain. En fonction de votre lieu de résidence, vous devrez peut-être le remplacer ou ajouter un adaptateur (comme je l'ai fait). Il y a même un petit tournevis, mais j'ai préféré utiliser mes propres outils pour assembler le bras.

Il y a pas mal de pièces et encore plus d'écrous et de boulons, mais tous ne sont pas utlisés. À l'exception de la plaque de base en acrylique et de l'os du bras en acier, toutes les pièces sont en aluminium. En les assemblant correctement, vous ne vous retrouvez pas avec un jouet bancal en plastique, mais avec un bras en métal solide et résistant. Bien que tout soit en aluminium, le bras assemblé pèse 1,3 kg (sans l'alimentation électrique).
Outil pédagogique
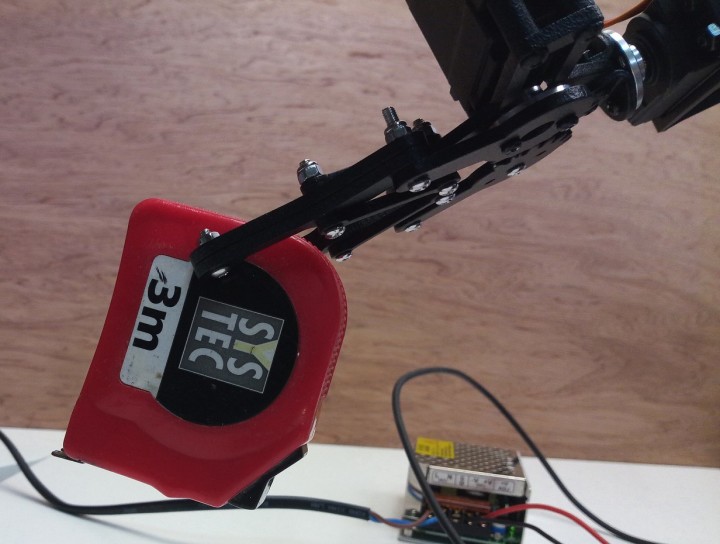
Le bras robotique 6-DOF est principalement un outil éducatif pour enseigner la programmation dans MicroPyhton. Il s'agit d'un objet amusant qui peut se mouvoir de nombreuses façons et qui peut ramasser de petits objets comme sa propre alimentation (environ 6 cm × 4 cm × 8,5 cm). Comme le montre en quelque sorte une vidéo de démonstration, vous pouvez par exemple l'utiliser pour jouer au jeu Tours de Hanoi. Il n'est pas adaptée aux applications industrielles ou aux tâches de haute précision. Il est doté d'une pince, mais je ne lui ferais pas confiance avec un outil dedans.
Ce que vous devez savoir avant tout
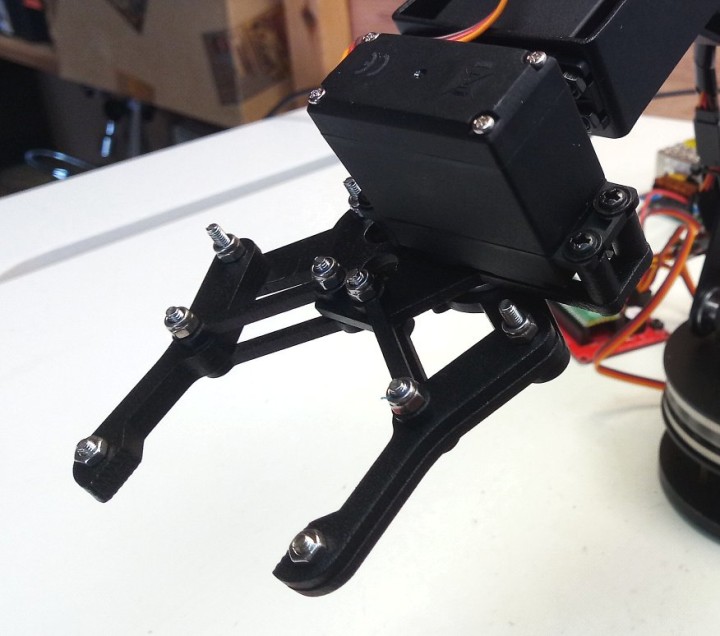
L'assemblage du bras robotique n'est pas pour les renonçeurs. Le manuel (non inclus, à vous de le trouver) est uniquement en chinois, et, en plus, peu clair et incomplet. Il existe également une courte vidéo d'animation de l'assemblage, mais elle est également incomplète. Pourtant, il est possible de le faire avec un peu de patience et de bon sens, car il ne s'agit pas d'un kit très compliqué. La seule partie complexe, la pince, est pré-assemblée. Cependant, il y a certaines choses que vous devez savoir à l'avance (et que j'ai découvert à la dure) :
- Soyez prêt à démonter les choses, afin de pouvoir les réassembler de la bonne manière. Le construire deux fois donnera probablement les meilleurs résultats.
- Commencez par le bas, c'est-à-dire la plaque de base avec la plate-forme rotative, et remontez.
- Le grand roulement de la base rotative est en trois parties. J'ai remarqué une légère différence de qualité de rotation entre les deux configurations d'assemblage possibles, mais en fin de compte, cela ne semble pas avoir d'importance du tout, car il fonctionne simplement comme un poids mort.
- Utilisez d'abord les deux servos rouges YF-6125MG. Mon kit en comprenait trois (un de rechange), mais le manuel et la vidéo les utilisent partout. Ces servos sont les plus forts et peuvent supporter le plus de poids, ils doivent donc être placés sur la partie inférieure du bras.
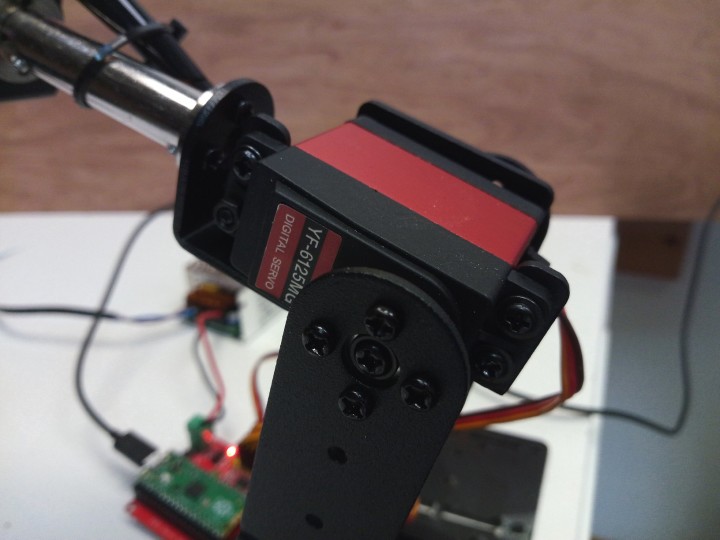
- Assurez-vous que tous les servos sont dans leur position médiane avant de les monter. Pour les servos noirs MG 996R, vous pouvez le faire manuellement/visuellement avec une sorte de pointeur/ bras de servo (inclus dans le kit). Les servos rouges YF-6125MG, par contre, n'ont pas de butée de fin de course, donc vous ne pouvez pas voir quand ils sont dans leur position médiane. J'ai fini par utiliser le Pico pour mettre à zéro les servos à la volée, c'est-à-dire en assemblant le bras. Cela peut sembler compliqué, mais c'est en fait assez facile à faire. Je vous suggère même de commencer l'assemblage en configurant l'environnement de développement MicroPython et en essayant d'exécuter les démos avec les servos non montés. Une fois que vous aurez compris comment contrôler les servos depuis MicroPython, vous pourrez les mettre à zéro et les monter dans le bras.
- Dans tous les sous-ensembles, le servo est monté en dernier. Ils doivent généralement être fixés avec les vis à tête en forme de chapeau).
- Veillez à bien serrer le tout, car c'est difficile à faire une fois le bras assemblé.
- La pince est préassemblée et branlante, et j'ai donc serré un peu les écrous autobloquants. Le résultat a été que le servo contrôlant la pince a grillé car la pince était apparemment devenue trop serrée pour être manipulée (même si je pouvais la mouvoir manuellement). Heureusement, le kit comprend deux servos de rechange.
- Il n'y a pas de schéma de câblage, il y a six servos, et l'embase de connexion des servos a huit positions. Heureusement, il y a un code de couleur, donc la polarité est facile à respecter. Connectez les servos en commençant par le bas. Le servo le plus bas (la base rotative, '0' ou 'A' dans le logiciel) se connecte à GPIO16, le plus haut (la pince, '5' ou 'F' dans le logiciel) va sur GPIO21. Le logiciel permet de remapper les broches GPIO, et la direction de rotation de chaque servo peut être définie aussi, donc vous avez une certaine liberté ici pour corriger les choses.
- La plaque de base comporte de nombreux trous, mais pas pour fixer la carte Pico ou l'alimentation.
- Assurez-vous que l'alimentation produit 5 V avant de la connecter au bras. La tension de sortie peut être réglée entre 4,5 V et 6,5 V environ.
Soyez prudent !
N'assemblez pas naïvement le bras robotique et ne lancez pas la démo sans avoir testé chaque servo au préalable. Le bras peut se mettre à tourner et à bouger dans tous les sens, faire tomber des objets du plan de travail ou vous frapper au visage. Ses servos sont puissants ! J'ai réussi à faire en sorte que le bras casse sa propre plaque de base acrylique de 4 mm d'épaisseur à cause d'un servo qui a poussé vers le bas sur le plan de travail au lieu de tourner vers le haut. En particulier, les servos rouges YF-6125MG tournent assez vite, alors faites attention. Je recommande donc fortement de fixer le bras au plan de travail ou sur une plaque lourde, et de garder l'espace autour libre.

Notez également que les servos rouges YF-6125MG n'ont pas de butée de fin de course et peuvent se tromper de sens pour atteindre leur position cible. Cela peut se produire lorsque le bras est replié puis remis sous tension. Je recommande donc vivement d'étirer le bras jusqu'à sa position verticale avant de le mettre sous tension.
Pas pour les mauviettes
Le bras robotique 6 DOF avec Raspberry Pi Pico de Makerfabs n'est pas un kit pour les mauviettes. L'assembler correctement demande de la patience et de la persévérance. Même si le bras est assez facile à utiliser grâce à son pilote et à sa démo écrite en MicroPython, il doit être apprivoisé pas à pas, sous peine d'accidents. Ses servos sont rapides et puissants, et le bras mesure 44 cm de long lorsqu'il est entièrement déployé (50 cm en incluant la base rotative). Il est fortement recommandé de le fixer au sol au centre d'un mètre carré vide de tout objet. Vous ne voulez pas qu'il écrase votre ordinateur portable ou qu'il fasse tomber votre tasse à café de la table, n'est-ce pas ?

Traduction : Maxime Valens
Discussion (0 commentaire(s))