
Microrobots de 220 µm mus par cils vibratiles
13 septembre 2016
sur
sur
Des chercheurs coréens ont mis au point des microrobots capables de se déplacer dans des environnements fluides à forte viscosité, en imitant le mouvement ciliaire de la paramécie. Ces tout petits engins, commandés à distance avec grande précision, pourraient administrer des substances médicamenteuses en circulant dans le sang ou les fluides internes du corps humain. Jusqu’ici, l’application du mouvement ciliaire des micro-organismes avait été théorisée mais jamais mise en pratique.
Dans les milieux à forte viscosité, la propulsion au moyen de mécanismes natatoires comme ceux des grands animaux et l’homme ne convient pas. L’imitation de la propulsion en spirale et par ondulation a déjà fait l’objet de travaux fructueux, mais pas le mouvement ciliaire alternatif, en raison de la difficulté de produire une microstructure à propulsion asymétrique par de nombreux cils vibratiles.
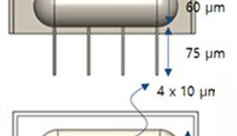
Les matériaux utilisés sont le nickel et le titane sur un substrat polymère photo-sensible, usiné par un laser en trois dimensions et des techniques de revêtement métallique de grande précision. La vitesse et la propulsion obtenues sont beaucoup plus élevées qu’avec des microrobots conventionnels mus par attraction magnétique. La vitesse des microrobots ciliaires de 220 µm de long et 60 µm de haut est de 340 µm/s, soit un gain de 8 à 25 fois la vitesse de microrobots conventionnels comparables.
L’imitation par des microrobots du mouvement ciliaire alternatif asymétrique à cette échelle a été rendue possible par les progrès récents de la précision des techniques de fabrication en 3 D et de la commande magnétique. Leur champ d’application de prédilection visée par les chercheurs coréens du DGIST est le corps humain, au service d’une chirurgie non invasive : le transport et l’administration de substances médicamenteuses et de cellules dans le corps d’un patient.
La vidéo montre leur aptitude à circuler à la fois librement et précisément dans une sphère de 80 µm de diamètre.
Dans les milieux à forte viscosité, la propulsion au moyen de mécanismes natatoires comme ceux des grands animaux et l’homme ne convient pas. L’imitation de la propulsion en spirale et par ondulation a déjà fait l’objet de travaux fructueux, mais pas le mouvement ciliaire alternatif, en raison de la difficulté de produire une microstructure à propulsion asymétrique par de nombreux cils vibratiles.
Les matériaux utilisés sont le nickel et le titane sur un substrat polymère photo-sensible, usiné par un laser en trois dimensions et des techniques de revêtement métallique de grande précision. La vitesse et la propulsion obtenues sont beaucoup plus élevées qu’avec des microrobots conventionnels mus par attraction magnétique. La vitesse des microrobots ciliaires de 220 µm de long et 60 µm de haut est de 340 µm/s, soit un gain de 8 à 25 fois la vitesse de microrobots conventionnels comparables.
L’imitation par des microrobots du mouvement ciliaire alternatif asymétrique à cette échelle a été rendue possible par les progrès récents de la précision des techniques de fabrication en 3 D et de la commande magnétique. Leur champ d’application de prédilection visée par les chercheurs coréens du DGIST est le corps humain, au service d’une chirurgie non invasive : le transport et l’administration de substances médicamenteuses et de cellules dans le corps d’un patient.
La vidéo montre leur aptitude à circuler à la fois librement et précisément dans une sphère de 80 µm de diamètre.
Lire l'article complet
Hide full article
Discussion (0 commentaire(s))