
Le chirurgien est un poulpe
21 mai 2015
sur
sur
Opérer sur les tissus mous du corps requiert un maniement délicat d’outils tranchants. Ce défi est encore plus grand lorsque le chirurgien est un robot, surtout si des organes doivent être déplacés. Il faudrait pouvoir faire se raidir sélectivement des matières molles. C’est ce qui a amené une équipe d'experts en robotique à la Scuola Superiore Sant'Anna (Pise) à construire un robot chirurgical qui se déplace à l'aide d'actionneurs pneumatiques, inspirés par les tentacules du poulpe.
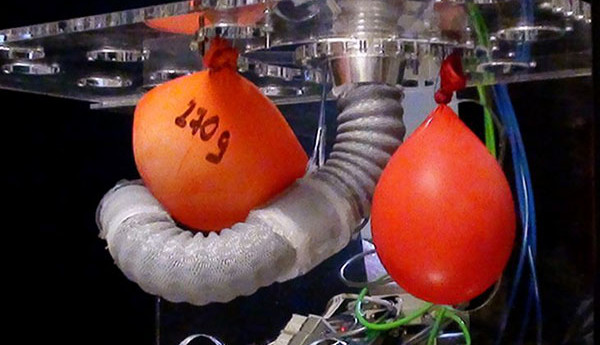
STIFF-FLOP, pour STIFFness controllable Flexible and Learnable manipulator for surgical OPerations, soit manipulateur programmable flexible à rigidité commandée pour opérations chirurgicales, est composé de trois chambres cylindriques connectées. Chaque cylindre est semblable à un ballon rempli de granulés. Lorsque l'air est aspiré hors de la chambre, les granulés sont compressés les uns contre les autres et la chambre devient rigide. Les bras se plient à 255° et s’étirent jusqu'à 62 % de leur longueur initiale.
Les opérations chirurgicales traditionnelles exigent souvent l'utilisation de plusieurs instruments spécialisés. Cet appareil est le premier pas vers la création d'un outil capable d'effectuer toutes ces tâches, d’atteindre des régions du corps difficiles d’accès et de soutenir les organes autour de la zone d’intervention.
Ce robot pourrait également être utilisé pour l'inspection industrielle et se faufiler à travers une ouverture étroite pour ensuite s’étirer dans une zone inaccessible ou dangereuse. Il pourrait également aider lors d’opérations de recherche et de sauvetage et à la neutralisation des bombes. Un robot capable de s’adapter à la forme de son environnement serait utile pour interagir avec des objets fragiles ou des êtres humains.
STIFF-FLOP, pour STIFFness controllable Flexible and Learnable manipulator for surgical OPerations, soit manipulateur programmable flexible à rigidité commandée pour opérations chirurgicales, est composé de trois chambres cylindriques connectées. Chaque cylindre est semblable à un ballon rempli de granulés. Lorsque l'air est aspiré hors de la chambre, les granulés sont compressés les uns contre les autres et la chambre devient rigide. Les bras se plient à 255° et s’étirent jusqu'à 62 % de leur longueur initiale.
Les opérations chirurgicales traditionnelles exigent souvent l'utilisation de plusieurs instruments spécialisés. Cet appareil est le premier pas vers la création d'un outil capable d'effectuer toutes ces tâches, d’atteindre des régions du corps difficiles d’accès et de soutenir les organes autour de la zone d’intervention.
Ce robot pourrait également être utilisé pour l'inspection industrielle et se faufiler à travers une ouverture étroite pour ensuite s’étirer dans une zone inaccessible ou dangereuse. Il pourrait également aider lors d’opérations de recherche et de sauvetage et à la neutralisation des bombes. Un robot capable de s’adapter à la forme de son environnement serait utile pour interagir avec des objets fragiles ou des êtres humains.
Lire l'article complet
Hide full article
Discussion (0 commentaire(s))