
Application pratique du Propeller 2 de Parallax (3) : faire clignoter une LED
sur
Dans les premier et deuxième articles de cette série, nous avons commencé à coder le microcontrôleur Propeller 2 et allumé une LED avec du code écrit en Spin2. Je vais maintenant vous proposer une solution pour faire clignoter cette LED et nous allons continuer à découvrir les broches d'E/S. Commençons tout de suite....
Une solution simple
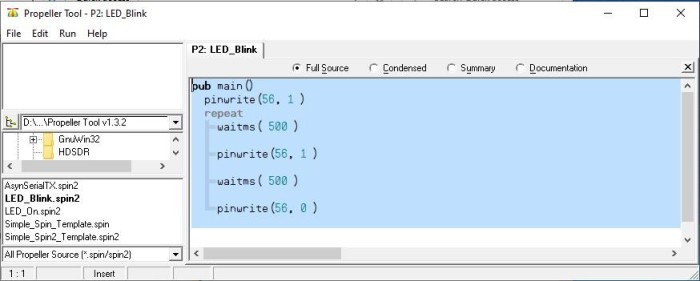
Vous pouvez suivre un schéma simple : « allumer la LED, puis l'éteindre ». Pour ce faire, vous avez besoin des fonctions suivantes :
- pinwrite()
- repeat()
- waitms()
Les étapes successives sont les suivantes :
- Allumer la LED
- Attendre 500 ms
- Éteindre la LED
- Attendre 500 ms
- Répéter
Le code se présente comme vous le voyez sur la figure 1. Vous pouvez le télécharger à l'aide de la page web de l'article [1].
Après avoir utilisé les broches en tant que sorties, l'étape suivante serait de montrer comment les utiliser sous forme d'entrées. Cependant, nous n'allons pas le faire à ce stade et nous reviendrons sur ce sujet plus tard. Le fait de disposer d'une sortie de données en série pour communiquer avec un PC fait de l'affichage d'un état lu sur une broche d'E/S quelque chose de beaucoup plus intéressant que le simple clignotement d'une LED. De plus, nous pouvons utiliser cette sortie pour envoyer des données d'état et faire un peu de débogage du code. La prochaine étape de cette série va concerner les broches intelligentes.
Broches intelligentes
Aujourd'hui, les équipes marketing adorent qualifier les produits d'« intelligents » (par exemple, « ville intelligente », « données intelligentes », « contrats intelligents »). Avec les broches intelligentes, c'est une autre histoire, car elles vont bien au-delà des broches d'E/S habituelles à usage général. Sur d'autres microcontrôleurs, vous avez parfois la possibilité de sélectionner plusieurs fonctions pour une broche spécifique. Certains, comme l'ESP32, possèdent une matrice d'E/S qui peut acheminer n'importe quel signal d'E/S interne de périphériques vers une broche arbitraire. Dans ces cas, une broche d'E/S ne sera toujours qu'une broche d'E/S et les fonctions des dispositifs UART, SPI ou CA/N se trouveront dans un bloc de matériel dédié, simplement connecté à la broche elle-même. Avec les broches intelligentes du Propeller 2, c'est différent car les périphériques dédiés ne sont plus des blocs de fonctions spécifiques à l'intérieur du microcontrôleur, acheminés par une matrice d'E/S, mais plutôt intégrés, au moins partiellement, dans chaque broche d'E/S. D'où le terme broche intelligente.
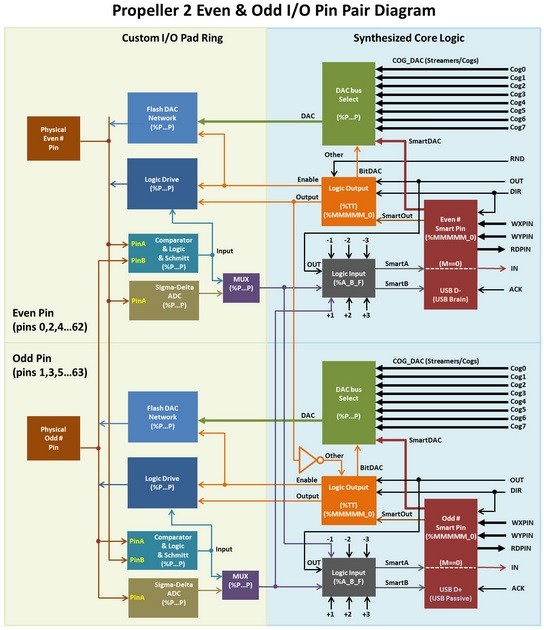
L'utilisateur 'rayman' a fort à propos fait un excellent travail sur le forum Parallax [2] en apportant à la communauté un aperçu du fonctionnement interne des broches intelligentes. Vous pouvez trouver sa publication sur le Propeller 2 et l'image en [3], ou voir la figure 2.
Dans la section « Récapitulatif des fonctions des broches intelligentes », j'ai incorporé un extrait de la fiche technique du Propeller 2. Comme vous pouvez le voir, une broche peut servir à plusieurs fonctions. Pour le moment, c'est la configuration 11110* = émission série asynchrone pour envoyer des données à des fins de débogage ultérieur qui nous intéresse. La première étape consiste à déterminer comment définir le mode approprié de la broche et si cela peut être fait avec Spin2 ou si nous devons y ajouter un peu de langage assembleur.
Configuration de l'UART
C'est à ce stade que vous allez commencer à vous gratter la tête si vous travaillez pour la première fois avec Spin2 et le Propeller 2. La fiche technique actuelle est relativement complète. Mais tout lire et comprendre peut nécessiter beaucoup de temps. Notre objectif est une fonction simple - tx() - dont le rôle est d'émettre un caractère sur une broche fonctionnant comme un UART. Nous allons travailler avec les paramètres suivants : 115200 bauds, 8 bits de données, pas de parité et un seul bit d'arrêt. La première étape consiste à configurer la broche.
Pour ce faire, procédez comme suit :
- Configurer la broche en émission série asynchrone
- Définir le débit en bauds et les bits de données
- Activer la broche intelligente
Ces trois étapes simples vont permettre de paramétrer une broche sous la forme d'un UART en mode émission. Comme nous allons par la suite modifier le code et le réutiliser, nous le plaçons dans une fonction. Une fonction contient simplement du code ou des fragments de code souvent utilisés dans un programme. Vous évitez ainsi un copier-coller dans le code et vous limitez par ailleurs la maintenance à cet emplacement unique. Nous allons donc utiliser une fonction et l'appeler serial_start. Celle-ci ne comporte aucun argument et se résume aux trois étapes indiquées ci-dessus. La broche utilisée est actuellement codée « en dur » comme broche 57 (l'une des broches de la LED également accessible sur l'un des connecteurs périphériques, comme le montre la figure 3).

La fonction commence par le préfixe PUB suivi de son nom. L'accolade finale est vide, car il n'y a pas d'arguments.
PUB serial_start()
WRPIN( 57, %01_11110_0 ) 'définit le mode d'émission asynchrone pour la broche tx
WXPIN( 57, ((217<<16) + (8-1 )) ) 'débit en bauds=sysclock/115200 et taille mot= 8 bits
org 'début de la partie en assembleur
dirh #57
end 'fin de la partie en assembleur
À partir de la ligne 1, nous avons la fonction, comme mentionné plus haut, - et plus précisément, l'en-tête de fonction. La ligne suivante positionne la broche 57 en émission série asynchrone, ce qu'indique la valeur 11110. Le premier bit est toujours à zéro ; les deux bits les plus significatifs, représentés ici par '01', indiquent que la broche doit être pilotée par la fonction GPIO ou Smart Pin (broche intelligente). Nous utilisons ici la fonction Spin2 WRPIN pour effectuer notre première étape. La fonction suivante, WXPIN, écrit le diviseur d'horloge et les bits de données à utiliser pour une broche intelligente en mode série asynchrone. Pour simplifier, nous ne tenons pas compte pour l'instant de la partie concernant le diviseur de débit d'émission. Il est possible de calculer la valeur de ce débit en appliquant la formule horloge système / débit en bauds - ici 25 MHz/115200 bauds - ce qui donne environ 217. Ce résultat doit être décalé de 16 vers la droite. Pour le nombre de bits à transférer, nous utilisons la formule (bits souhaités-1), ce qui nous laisse (8-1) bits.
Toute la magie de la configuration du débit d'émission et des bits de données est là. Les trois lignes suivantes sont différentes du code précédent. Comme il s'agit de montrer une petite section d'assembleur, quelques mots d'explications supplémentaires sont nécessaires. Avec l'indication org, vous pouvez incorporer une section d'instructions d'assembleur, nécessaires ici. La commande dirh activera les fonctions de broche intelligente comme prévu pour notre étape 3. Ce qui est différent, c'est la façon d'indiquer le numéro de la broche sur laquelle nous travaillons, car il doit commencer par un '#'.
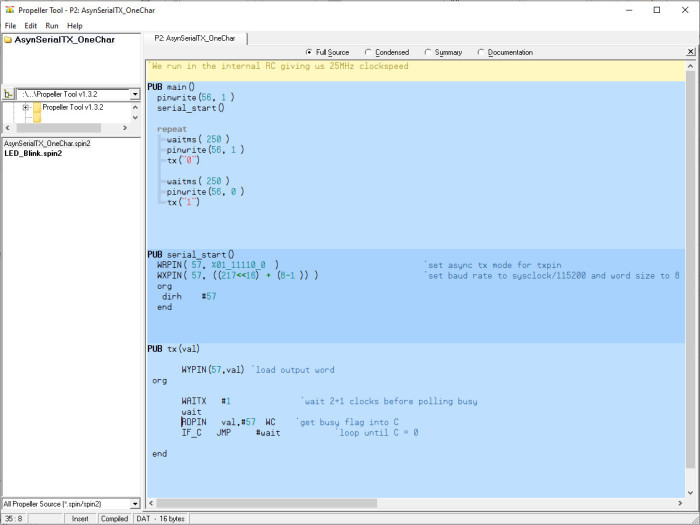
La dernière ligne termine la section d'assembleur. Dans ce cas particulier, elle correspond également à la fin de la fonction elle-même. Il aurait été mieux d'éviter l'assembleur mais il n'y a actuellement aucun équivalent Spin2 pour l'instruction dirh. La figure 4 contient le code formaté et mis en évidence.

La broche étant dans le bon mode, nous pouvons continuer et mettre en place une fonction pour émettre un caractère et attendre jusqu'à ce que ce soit fait. Il est possible de récupérer cette fonction dans la fiche technique [4], page 91. Nous avons vu comment créer des fonctions sans arguments, ce qui signifie qu'aucune information ne leur est transmise. Pour émettre un caractère, il serait utile de pouvoir passer ce que nous voulons transmettre à la fonction. Comme nous essayons d'éviter autant que possible l'assembleur, nous utiliserons, le cas échéant, les fonctions Spin2 plutôt que l'assembleur intégré.
Émission
Pour l'émission, nous créons une fonction tx presque identique à la fonction serial_start() comme le montre la figure 5.
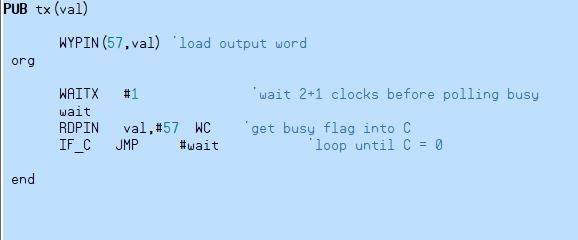
La différence visible, outre le nom, est l'argument 'val' entre parenthèses. 'val' contiendra le caractère à imprimer. À l'intérieur de la fonction, nous allons d'abord écrire la valeur dans le registre de transmission de la broche 57 à l'aide de la commande WYPIN. La section suivante contient à nouveau quelques lignes de code assembleur. Nous devons attendre que le drapeau 'occupé' de l'émetteur ne soit plus activé et que l'émission soit terminée. D'après la fiche technique, nous devons d'abord attendre trois cycles de l'unité centrale pour lire le drapeau en toute fiabilité. Cette opération est réalisée par l'instruction WAITX avec le paramètre #1, car son exécution prend deux cycles + la valeur spécifiée pour la fonction (ici un cycle). La ligne suivante est un libellé appelé wait, en langage assembleur. Nous pourrons y accéder ultérieurement. L'instruction RDPIN en assembleur, comme écrit ici, sert à lire l'état de la broche avec report. Ce report est indiqué par l'indication WC à la fin de l'instruction. Le bit de report, qui sert ici de drapeau d'occupation, est important car il indique si l'émission est terminée.
RDPIN val, #57 WC lit l'état, y compris le bit de report dans notre valeur val. Comme le contenu est en cours d'émission, nous pouvons réutiliser la mémoire de val pour y lire l'état de la broche intelligente. L'ultime commande IF_C JMP #wait est un saut conditionnel ; en BASIC, ce serait l'équivalent du fameux GOTO combiné à une instruction IF. Traduit succinctement, elle signifie : Le bit de report (ici le drapeau 'occupé') est-il positionné dans la valeur lue ? Revenir au libellé 'attente' et recommencer à partir de là, sinon continuer. Notre émission est considérée comme terminée si le bit de report n'est plus positionné. La fonction s'exécutera donc jusqu'à sa fin et reviendra là où elle a été appelée.
Assemblage des différentes parties
Nous pouvons maintenant assembler le code et insérer, après chaque fonction pinwrite(), l'émission d'un « 0 » ou d'un « 1 » en incorporant les fonctions tx("0") ou tx("1") dans notre code, comme le montre la figure 6.
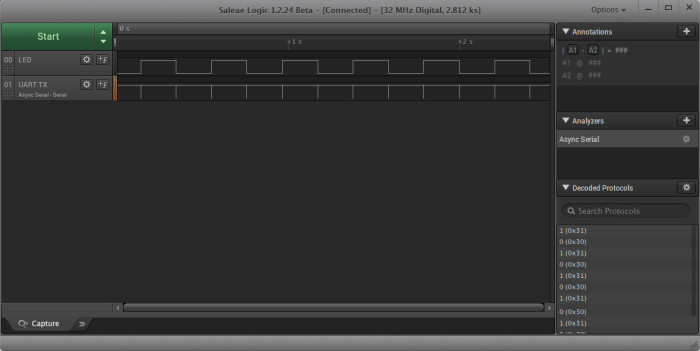
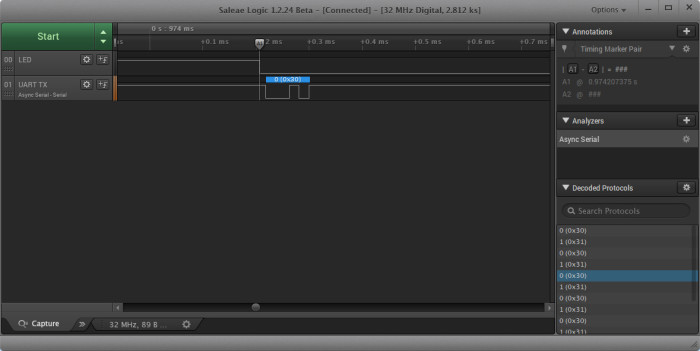
Pour capturer la sortie, connectez un convertisseur série USB. À cet effet, nous avons utilisé notre fidèle Logic 16 et enregistré la sortie de la LED et l'émission en série. Le résultat apparaît dans la figure 7 et la figure 8.
Mais qu'en est-il des chaînes de caractères ? Ne serait-il pas agréable de faire un simple print("Hello World") et de le transmettre par la liaison série comme nous en avons l'habitude dans l'univers Arduino ? Oui, c'est possible et nous le ferons. La prochaine étape de nos articles à propos du Propeller 2 abordera ce sujet.
Propeller 2 : récapitulatif des fonctions de broches intelligentes
00000= broche intelligente désactivée (par défaut)
00001= référentiel long (P[12:10] != %101)
00010= référentiel long (P[12:10] != %101)
00011= référentiel long (P[12:10] != %101)
00001= bruit CN/A (P[12:10]= %101)
00010= bruit de dispersion 16 bits CN/A, bruit (P[12:10]= %101)
00011= bruit de dispersion 16 bits CN/A, PWM** (P[12:10]= %101)
00100*= sortie impulsion/cycle
00101*= sortie transition
00110*= fréquence oscillateur à commande numérique (NCO)
00111*= service oscillateur à commande numérique (NCO)
01000*= triangle PWM
01001*= dent de scie PWM
01010*= PWM alimentation à découpage, retour V et I
01011= périodique/continu : codeur à quadrature A-B
01100= périodique/continu : aug. sur montée A & B haut
01101= périodique/continu : aug. sur montée A & B haut / dim. sur montée A & B bas
01110= périodique/continu : aug. sur A haut {/ dim. sur montée B}
01111= périodique/continu : aug. sur A haut {/ dim. sur B haut}
10000= durée des états continus sur entrée A
10001= durée des états hauts continus sur entrée A
10010= durée de X états hauts/montées/fronts sur entrée A ou temporisation sur X états hauts/montées/fronts sur entrée A
10011= pendant X périodes, mesure du temps
10100= pendant X périodes, comptage des états
10101= pour des périodes de X cycles d'horloge minimum, mesure du temps
10110= pour des périodes de X cycles d'horloge minimum, comptage des états
10111= pour des périodes de X cycles d'horloge minimum, comptage des périodes
11000= échantillonnage/filtrage/capture CA/N, horloge interne
11001= échantillonnage/filtrage/capture CA/N, horloge externe
11010= oscillo CA/N avec déclencheur
11011*= hôte/dispositif USB (paire de broches paire/impaire = DM/DP)
11100*= émission série synchrone (données A, horloge B)
11101= réception série synchrone(données A, horloge B)
11110*= émission série asynchrone (débit en bauds)
11111= réception série asynchrone (débit en bauds)
* signal OUT forcé
** PWM = modulation de largeur d'impulsion
En savoir plus sur Propeller 2 et d'autres sujets associés
Vous souhaitez davantage d'informations sur des sujets comme le microcontrôleur Propeller 2 ? Devenez membre d'Elektor dès aujourd'hui et bénéficiez sans exception de tous les articles, projets ou tutoriels publiés.
Discussion (0 commentaire(s))