
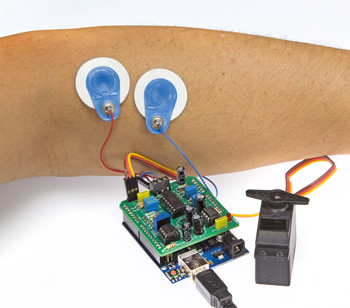
commande « musclée » de servomoteurs
Arduino interprète les signaux EMG
Ceci est un article RÉSERVÉ AUX MEMBRES. Vous avez besoin d'un abonnement pour lire cet article.
- Accès aux archives Elektor et à plus de 5 000 fichiers Gerber
- Recevez jusqu'à 8 magazines par an (numériques et/ou papier)
- 10 % de réduction dans la boutique Elektor
Disponible à partir de 4,95 € par mois.
Qu'est-ce que la Uniquement membres
Elektor s'engage à fournir des contenus de haute qualité dans le domaine de l'électronique, servant ainsi des dizaines de milliers de membres payants. Dans le cadre de cet engagement, Elektor a lancé l'initiative Premium, qui propose des articles en ligne exclusifs pour les membres, parfois même avant leur publication dans le magazine.
Chaque jour, les membres peuvent accéder à des articles approfondis qui présentent le meilleur des contenus Premium d'Elektor.
Cette initiative vise à récompenser les membres en leur offrant un accès anticipé. Une fois connecté, vous pouvez facilement profiter de ce contenu exclusif et participer aux discussions sur les projets présentés.
Alors que Premium élargit les ressources disponibles, Elektor continuera à fournir une richesse d'informations gratuites.
Rejoignez dès aujourd'hui la communauté Elektor pour profiter de Premium et d'autres avantages !
Info supplémentaire / Mise à jour
* Shield Arduino
* Composants traversants uniquement
Liste des composants
Par défaut : 250 mW 5%
R1,R2,R9,R10,R13,R17 = 1 kOHM
R3,R4 = 47 kOHM
R5,R8 = 15 kOHM
R6,R11 = 18 kOHM
R7,R12,R16 = 10 kOHM
R14 = 100 kOHM
R15 = 27 kOHM
R18 = 220 OHM
P1 = 500 kOHM, ajustable, 24 tours
Condensateurs
C1,C3,C4 = 100 µF, 50 V, pas de 2 mm
C2,C11 = 100 nF, pas de 5,08 mm
C5,C6 = 470 nF, 50 V, pas de 5,08 mm
C7,C8 = 330 nF, 50 V, pas de 5,08 mm
C9,C10 = 10 µF, 50 V, pas de 2 mm
Semi-conducteurs
D1 = 1N4148
D2 = 1N5224B-TP
IC1 = MAX660CPA
IC2 = TL084ACN
IC3 = TL082CP
LED = rouge, 3 mm
Divers
K1,K3 = embase à 8 picots, au pas de 2,54 mm
K2 = embase à 10 picots, au pas de 2,54 mm
K4 = embase à 6 picots, au pas de 2,54 mm
K5 = bornier à vis à 3 contacts pour circuit imprimé, au pas de 3,5 mm
K4 = embase à 3 picots, au pas de 2,54 mm
Circuit imprimé réf. 130343-1
Discussion (0 commentaire(s))