
Babybot
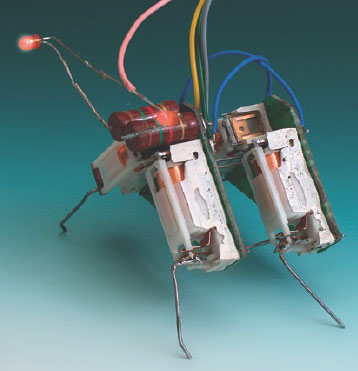
Il existe nombre de techniques différentes pour mettre un robot en mouvement. Dans la majorité des cas, la solution la plus simple s’appelle combinaison de moteurs électriques, servos et moteurs pas à pas. Et surtout dès lors que l’on a besoin d’une certaine puissance pour le déplacement. En ce qui concerne des objets de très petite taille, on peut penser à d’autres actionneurs, comme c’est le cas sur ce mini-robot.
Ici, le terme « robot » est peut-être prétentieux. Cette créature est pilotée de l’extérieur et ne comporte pas la moindre intelligence artificielle, mais sa manière de se déplacer est très particulière, pouvant, avec quelques modifications, être utilisée sur d’autres projets.
Ceci est un article RÉSERVÉ AUX MEMBRES. Vous avez besoin d'un abonnement pour lire cet article.
- Accès illimité aux articles réservés aux membres
- 3 nouvelles éditions du magazine Elektor (numériques)
- Plus de 5000 fichiers Gerber
- 20% de réduction pour les membres sur les e-books (sur elektor.fr)
- 10% de réduction pour les membres sur les produits (sur elektor.fr)
Disponible à partir de 6,33 € par mois.
Qu'est-ce que la Uniquement membres
Elektor s'engage à fournir des contenus de haute qualité dans le domaine de l'électronique, servant ainsi des dizaines de milliers de membres payants. Dans le cadre de cet engagement, Elektor a lancé l'initiative Premium, qui propose des articles en ligne exclusifs pour les membres, parfois même avant leur publication dans le magazine.
Chaque jour, les membres peuvent accéder à des articles approfondis qui présentent le meilleur des contenus Premium d'Elektor.
Cette initiative vise à récompenser les membres en leur offrant un accès anticipé. Une fois connecté, vous pouvez facilement profiter de ce contenu exclusif et participer aux discussions sur les projets présentés.
Alors que Premium élargit les ressources disponibles, Elektor continuera à fournir une richesse d'informations gratuites.
Rejoignez dès aujourd'hui la communauté Elektor pour profiter de Premium et d'autres avantages !
Discussion (0 commentaire(s))