
Pilote complet de moteur pas à pas
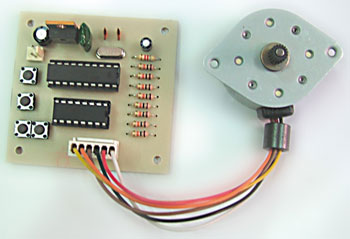
Ce circuit va vous permettre de faire à peu près tout ce qu’il faut dans les applications de robotique : tourner à gauche ou à droite, à pas complets ou par demi-pas.
Le moteur pas à pas convertit des impulsions électriques en mouvements mécaniques. Sur les disques durs, les imprimantes, les numériseurs, certains photocopieurs, on utilise des moteurs pas à pas pour tourner ou commander avec précision le positionnement d’organes mécaniques. La plupart des moteurs pas à pas sont faits d’un axe en aimant permanent appelé rotor, entouré d’une partie fixe que l’on nomme stator. D’habitude, ces moteurs sont dotés d’un stator à quatre fils avec deux ou un point commun, que l’on branche souvent au positif de l’alimentation.
Ceci est un article RÉSERVÉ AUX MEMBRES. Vous avez besoin d'un abonnement pour lire cet article.
- Accès illimité aux articles réservés aux membres
- 3 nouvelles éditions du magazine Elektor (numériques)
- Plus de 5000 fichiers Gerber
- 20% de réduction pour les membres sur les e-books (sur elektor.fr)
- 10% de réduction pour les membres sur les produits (sur elektor.fr)
Disponible à partir de 6,33 € par mois.
Qu'est-ce que la Uniquement membres
Elektor s'engage à fournir des contenus de haute qualité dans le domaine de l'électronique, servant ainsi des dizaines de milliers de membres payants. Dans le cadre de cet engagement, Elektor a lancé l'initiative Premium, qui propose des articles en ligne exclusifs pour les membres, parfois même avant leur publication dans le magazine.
Chaque jour, les membres peuvent accéder à des articles approfondis qui présentent le meilleur des contenus Premium d'Elektor.
Cette initiative vise à récompenser les membres en leur offrant un accès anticipé. Une fois connecté, vous pouvez facilement profiter de ce contenu exclusif et participer aux discussions sur les projets présentés.
Alors que Premium élargit les ressources disponibles, Elektor continuera à fournir une richesse d'informations gratuites.
Rejoignez dès aujourd'hui la communauté Elektor pour profiter de Premium et d'autres avantages !
Discussion (0 commentaire(s))