
Capteur auditif stéréo
Comment permettre à un robot de localiser des sources sonores
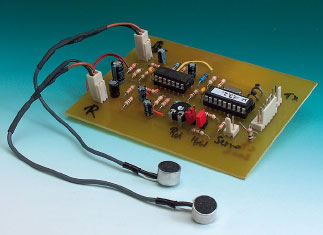
Les serviteurs robots de l’avenir doivent être capables de localiser leur « maître » ou « maîtresse », de les identifier à la voix et aussi de comprendre leurs ordres vocaux. Cet article est consacré à la localisation acoustique basée sur la fonction d’intercorrélation. Une simplification de ce procédé de calcul met le tout à la portée d’un microcontrôleur. Le « capteur binaural » ainsi conçu peut déterminer la direction d’un signal sonore continu à 10° près.
Le robot en LEGO GASTON [1], réalisé en 2003 par des élèves (grande photo) comporte un grand nombre de fonctions intéressantes, telles qu’exprimer des sentiments. Il peut en outre localiser des sources sonores dans l’espace et tourner la tête dans cette direction. Il se sert pour cela d’un capteur dit à effet d’antériorité ou de Haas équipé de 3 microphones. Une onde sonore parvient à chaque micro à un instant différent. Ce décalage temporel permet d’estimer la direction d’où proviennent des bruits d’un niveau plus ou moins élevé (applaudissements ou claquements de doigts).
Ceci est un article RÉSERVÉ AUX MEMBRES. Vous avez besoin d'un abonnement pour lire cet article.
- Accès illimité aux articles réservés aux membres
- 3 nouvelles éditions du magazine Elektor (numériques)
- Plus de 5000 fichiers Gerber
- 20% de réduction pour les membres sur les e-books (sur elektor.fr)
- 10% de réduction pour les membres sur les produits (sur elektor.fr)
Disponible à partir de 6,33 € par mois.
Qu'est-ce que la Uniquement membres
Elektor s'engage à fournir des contenus de haute qualité dans le domaine de l'électronique, servant ainsi des dizaines de milliers de membres payants. Dans le cadre de cet engagement, Elektor a lancé l'initiative Premium, qui propose des articles en ligne exclusifs pour les membres, parfois même avant leur publication dans le magazine.
Chaque jour, les membres peuvent accéder à des articles approfondis qui présentent le meilleur des contenus Premium d'Elektor.
Cette initiative vise à récompenser les membres en leur offrant un accès anticipé. Une fois connecté, vous pouvez facilement profiter de ce contenu exclusif et participer aux discussions sur les projets présentés.
Alors que Premium élargit les ressources disponibles, Elektor continuera à fournir une richesse d'informations gratuites.
Rejoignez dès aujourd'hui la communauté Elektor pour profiter de Premium et d'autres avantages !
Matériaux
Fichier Gerber
Le circuit imprimé de cet article est disponible sous forme d’un ou plusieurs fichiers Gerber. Seuls les membres de la communauté d’Elektor peuvent télécharger gratuitement ce(s) fichier(s). Avec ce(s) fichier(s), vous pouvez réaliser vous-même le circuit imprimé ou bien le faire faire.
Si vous souhaitez passer par un service en ligne, nous vous recommandons notre partenaire Eurocircuits. Nous faisons régulièrement appel à Eurocircuits pour nos prototypes et notre production en série.
L’utilisation de nos fichiers Gerber est protégée par une licence Creative Commons modifiée. Creative Commons offre aux auteurs, scientifiques, enseignants et autres créateurs la liberté de gérer avec souplesse leurs droits d’auteur, sans perdre leurs droits réservés.
Liste des composants
Résistances :
R1,R5,R12 = 47 kΩ
R2 = 33 kΩ
R3,R10 = 22 kΩ
R4,R11 = 1 kΩ
R6,R9,R13,R16,R18,R19,R20 = 10 kΩ
R7, R14 = 2kΩ2
R8, R15 = 100 kΩ
R17 = ajustable 100 kΩ
Condensateurs :
C1,C2,C3,C4 = 1 µF/16 V
C5 = 22 µF/16 V
C6 = 100 µF/16 V
C7,C8 = 100 nF
C9,C10 = 22 pF
Semi-conducteurs :
IC1 = LM324
IC2 = PIC16F88 (programmé, EPS060040-41 disponible auprès des adresses habituelles)
Divers :
X1 = quartz 20 MHz
support DIL14
support DIL18
K1,K3,K4,K5 = embase autosécable à 1 rangée de 2 contacts (K4 est ponté pour l’instant par une résistance de 100 kΩ, cf. texte)
K2 = embase autosécable à 1 rangée de 6 contacts
JP1,JP2 = cavalier
MicR,MicL = micro électret CZ034
platine EPS060040-1
Discussion (0 commentaire(s))