
E-blocks ? Passons au CAN
Un système complexe devient transparent
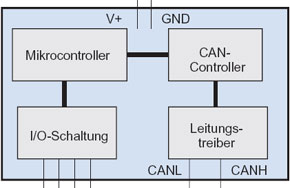
CAN est l’acronyme de Controller Area Network, et définit un standard international pour la communication sérielle en vue de la commande de périphériques connectés à un réseau. Le standard CAN gouverne certains des attributs physiques du réseau mais aussi les protocoles de communication logicielle à niveau basique.
Physiquement, le bus CAN prend la forme de paires de conducteurs torsadées utilisant des tensions différentielles pour la transmission de données - CAN ne connaît pas de conducteur de terre (masse) et les tensions différentielles protègent bien le système à l’encontre du bruit. CAN étant conçu à l’origine pour la commande pure, ce qui explique que les messages utilisés soient courts, ne dépassant jamais 8 octets au maximum.
Ceci est un article RÉSERVÉ AUX MEMBRES. Vous avez besoin d'un abonnement pour lire cet article.
- Accès illimité aux articles réservés aux membres
- 3 nouvelles éditions du magazine Elektor (numériques)
- Plus de 5000 fichiers Gerber
- 20% de réduction pour les membres sur les e-books (sur elektor.fr)
- 10% de réduction pour les membres sur les produits (sur elektor.fr)
Disponible à partir de 6,33 € par mois.
Qu'est-ce que la Uniquement membres
Elektor s'engage à fournir des contenus de haute qualité dans le domaine de l'électronique, servant ainsi des dizaines de milliers de membres payants. Dans le cadre de cet engagement, Elektor a lancé l'initiative Premium, qui propose des articles en ligne exclusifs pour les membres, parfois même avant leur publication dans le magazine.
Chaque jour, les membres peuvent accéder à des articles approfondis qui présentent le meilleur des contenus Premium d'Elektor.
Cette initiative vise à récompenser les membres en leur offrant un accès anticipé. Une fois connecté, vous pouvez facilement profiter de ce contenu exclusif et participer aux discussions sur les projets présentés.
Alors que Premium élargit les ressources disponibles, Elektor continuera à fournir une richesse d'informations gratuites.
Rejoignez dès aujourd'hui la communauté Elektor pour profiter de Premium et d'autres avantages !
Discussion (0 commentaire(s))