
Localiser des lignes électriques cachées
sur
À la recherche de lignes enfouies et coupées
Par où passe donc ce câble enfoui dans le sol ou caché derrière une cloison ? Cette question concerne les électriciens qui réhabilitent un logement ancien, mais aussi tous ceux qui aiment bricoler dans leur maison ou leur jardin. Il est parfois vraiment délicat de trouver des lignes de filoguidage enfouies. Cet article vous présente des méthodes de recherche de lignes de cuivre dissimulées, même coupées.
Tout a commencé il y a deux ans : au printemps, ma pelouse commençait à pousser. Le moment de tirer la tondeuse de son hibernation, pour la réviser, la ravitailler en carburant puis la remettre sur l’herbe. Mais déjà l’année précédente, à la vue de la belle pelouse de mon voisin soigneusement tondue par un robot-tondeur, je m’étais demandé : pourquoi tondre moi-même, si un automate le fait si bien ? Aussitôt dit, aussitôt fait ! Enfin, presque.
Des lignes et des pelouses
Une fois ouvert l’énorme carton surviennent des problèmes largement sous-estimés. Lors de la recherche de l’appareil adéquat pour un jardin en forme de U comme le mieux, avec plusieurs passage étroits de moins de 1 m, j’ai découvert les particularités de ces automates. Je savais qu’un tel robot-tondeur n’est pas très malin, mais se déplace dans l’herbe selon un parcours aléatoire. S’il rencontre un obstacle, il recule, change d’angle de façon aléatoire, et repart jusqu’à la fin de la durée de tonte prévue, ou jusqu’à ce que sa batterie soit presque déchargée.

Un robot sans caméra ni cartographie des lieux, donc assez stupide. Il lui faut donc un câble de délimitation pour l’empêcher de quitter le terrain ou d’oublier une zone à tondre. Et pour retrouver sa station de charge, notre robot a besoin d’un guide, de préférence enfoui, traversé par un courant pulsé . Le robot s’oriente grâce à ses capteurs de champ magnétique intégrés. Pour mon robot (fig. 1), ce signal est chiffré individuellement par mot de passe, de sorte qu’en cas de vol le robot est inutilisable. Le seul luxe supplémentaire de mon modèle est une connexion sans fil à l’internet par un modem. Où que je sois dans le monde, je peux ainsi vérifier sur mon téléphone ce que mon robot est en train de faire, et le renvoyer à sa niche (fig. 2) en cas de forte pluie par exemple.

modifié une niche. Mon chien a vite compris que ce n’était pas son domicile.
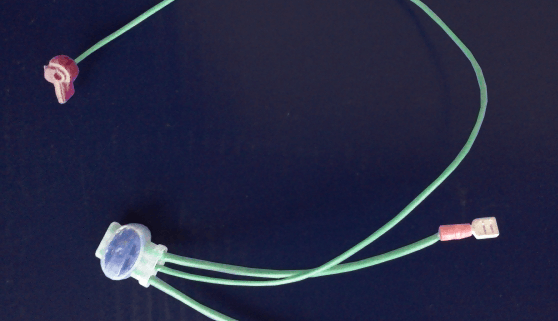
Avant de pouvoir assister au spectacle d’une tonte automatique, les dieux du jardinage et de la technique réunis m’ont donc infligé le travail de pose d’un câble de filoguidage d’environ 1,5 mm2 d’au moins 500 m. Pour se simplifier la vie, on peut poser le câble sur le sol et l’agrafer tous les 50 cm à l’aide d’une sorte de sardine en plastique (fig. 3). Le fabricant prétend qu’avec le temps le câble disparaîtra dans l’épaisseur de la pelouse. Hmmm... C’est peut-être envisageable aux endroits où personne ne met jamais les pieds, mais pour les endroits de passage, il est préférable de poser le câble entre 10 et 20 cm de profondeur ou sous des pierres ou des plaques. Vous pouvez aussi creuser une petite tranchée pour y enfouir le câble. Ou faire appel à un professionnel équipé d’une machine à poser les câbles qui effectuera ce travail pendant que vous siroterez votre boisson préférée. J’ai eu droit aux quatre méthodes ! En effet; à peine avais-je enfoui mon câble que je tome sur un os... dans le manuel ! Celui-ci indique que la distance entre le câble et les bords ou les obstacles est de 15 à 50 cm. Prudent, j’ai pris de la marge et posé mes câbles à 20 cm des bords. Ce n’est qu’au cours de la phase de configuration du robot, qu’il est apparu que la distance minimale configurable était de 25 cm. J’ai décroché le téléphone pour partager ma colère avec le fournisseur de la tondeuse qui m’a promptement envoyé un professionnel avec sa machine de pose, qui a repris, cette fois à une distance de 30 cm, la ligne de 250 m déjà posée par mes soins. Comme je l’avais espéré, tout est rentré dans l’ordre et la tondeuse au bercail.

Rupture de câble
Mon bonheur aura été de courte durée. Quelqu’un qui comme moi se préoccupe à ce point de sa pelouse en prend forcément grand soin. Ce qui dans mon cas implique de faire la vie dure au pissenlit ! Comme je suis le seul à savoir où se trouvent les câbles enfouis sous l’herbe, je suis aussi le seul habilité à y déraciner les mauvaises herbes. Cela a très bien fonctionné jusqu’au jour où je me suis trompé de quelques centimètres en tranchant la racine profonde d’un magnifique pissenlit. Le robot s’est arrêté de fonctionner, j’avais sectionné accidentellement sa ligne. Heureusement, comme je savais où je venais de jardiner, j’ai retrouvé aisément les extrémités du câble sectionné pour faire une épissure : il suffit d’en placer les deux extrémités dans une pince spéciale, étanche et remplie de graisse (fig. 4), de serrer et le tour est joué.

Au cours de la deuxième année de tonte autonome, ma vigilance a diminué. Un beau jour le robot s’est de nouveau arrêté. Précisément là où la machine de pose professionnelle avait été active et où le câble était enfoui le plus profondément. Que faire ? Sonder à différents endroits ? Ou laisser libre cours à mon goût pour les astuces techniques ? Pause-café d’abord, puis intense réflexion, et enfin séance de recherche sur Google.
Essaye encore !
Ma première idée a été de débrancher tous les câbles de la station de charge (fig. 5) depuis la niche, et de les connecter directement au secteur via une « résistance série » (en fait une lampe à incandescence), dans l’espoir d’entendre ensuite un grésillement à l’endroit du défaut, si du moins le sol était assez humide. Il ne l’était pas ! Pas un son, quelle que soit l’extrémité du câble que je connecte au réseau. Vous me voyez agenouillé sur la pelouse, tendre l’oreille vers les brins d’herbe ? Non seulement c’est grotesque, mais c’est risqué, car l’oreille n’est pas très loin de la boîte à idées et tout le monde sait qu’il ne faut pas malmener les neurones sous 230 V. [N’utilisez donc jamais la tension du secteur comme outil de mesure comme j’ai essayé de le faire !]

Alors que faire ? J’avais bien sous main des capteurs à effet Hall, mais à quoi bon, puisque aucun courant ni donc de champ magnétique ne circule en cas de coupure. C’est d’ailleurs ce qu’avait déjà remarqué le robot pourtant pas très malin ;-).
En faisant mes recherches sur Google, il est apparu qu’un robot-tondeur ou sa station de charge injecte dans les lignes des signaux pulsés dont les harmoniques peuvent être reçues par un récepteur d’ondes longues. Non, ça ne marche pas avec un récepteur FM, car un sol humide isole assez bien les hautes fréquences. Chez moi, la radio (numérique) vient de l’internet ou de la prise réseau. J’ai emprunté la bonne vieille radio portable analogique de la cuisine de ma mère. Pour faire ce test, il ne faut connecter qu’une seule extrémité du câble à la station de charge. Si vous branchiez les deux bouts du câble sectionné, vous y injecteriez le même signal, et vous ne détecteriez jamais la rupture. Même si la localisation par sondage du rayonnement électromagnétique est approximative, ça marche !
En approchant la radio d’un câble porteur du signal, vous percevrez un changement de crépitement. Réglez le volume du récepteur de telle sorte que de petits changements de distance fassent varier le signal sonore. Ça fonctionne même avec des lignes enterrées à 20 cm de profondeur. Trois ou quatre essais au sol ont suffi pour trouver le point où le signal s’arrêtait brusquement. Soulagé, tout en réparant le câble endommagé, je portais un toast à Google où j’ai trouvé l’idée d’utiliser un bon vieux récepteur.
Autres cas
Si vous devez percer des trous dans un mur, par exemple pour y poser une étagère vissée, dites-vous que sous le plâtre il y a peut-être une gaine électrique sur laquelle vous risquez de tomber avec votre perceuse. Il faut redoubler de précautions dans les salles de bains et autres pièces humides. En fait, avant de saisir votre perceuse, vous devriez toujours commencer par sonder le mur.
Pour s’assurer de l’absence de câble ou de tuyau métallique à proximité du trou à percer, utilisez l’un de ces « détecteurs de métaux » vendus dans les magasins de bricolage. Ces appareils indiquent si vous pouvez percer avec un « risque faible » ou « probablement sans risque ». Des appareils plus ambitieux (fig. 6) connaissent différents modes de fonctionnement et sont supposés détecter le bois ou son humidité (selon mon expérience, plutôt mal, voire pas du tout), le métal (ferreux ou non ferreux, cela fonctionne à peu près) ainsi que les champs électriques alternatifs (fonctionne à peu près). Un tel appareil est suffisant pour une installation domestique normale, et c’est toujours mieux que rien.

acheté dans un magasin de bricolage.
En testant pour Elektor un véritable détecteur de métal, le CS-400 de Velleman (fig. 7), j’ai découvert qu’un tel appareil était particulièrement bien adapté à la détection de câbles ou de tuyaux métalliques invisibles. Il permet même de déterminer avec précision la position de tasseaux en bois derrière des panneaux de placoplâtre. Même les versions bon marché de ces véritables détecteurs de métaux (certes plus coûteux et moins maniables) sont bien plus précises et fiables que les simples détecteurs des magasins de bricolage.

Si un détecteur de métal, sensible comme le Velleman ou juste correct et surtout bon marché comme ceux des magasins de bricolage, convient parfaitement pour détecter du métal dans les murs ou le sol, il ne sera d’aucune utilité en revanche pour des lignes coupées. En effet, l’écart entre les extrémités du fil coupé est généralement si faible que sa détection est impossible. C’est là que méthode de la radio fait merveille.
Que faire en l’absence de signal RF ou de flancs raides pour assurer la présence d’harmoniques assez nombreuses et puissantes ?
Eh bien, dans ce cas, vous construisez vous-même un générateur !
Solution universelle
Après mon expérience avec le câble de filoguidage de ma pelouse, il me fallait une méthode qui fonctionne (presque) toujours, et partout. Même avec un robot-tondeur sans signaux à flancs raides détectables à l’aide d’une radio. Ou lorsqu’un câble d’alimentation (pour un lampadaire par exemple) passe dans le sol où tôt ou tard il rencontre malencontreusement une bêche ou un motoculteur. En somme, un circuit électronique qui produise un signal pour la détection avec un récepteur approprié, pour tous les cas dans lesquels une coupure de ligne doit être localisée.
Ce n’est pas difficile à construire, mais il faut définir vos critères. Le sol ou les murs atténuent davantage les fréquences élevées. Un récepteur radio nous évitera d’avoir à en construire un. L’idéal, c’est la radio à grandes ondes (GO ou LW). Ces récepteurs analogiques sont progressivement supplantés par les récepteurs numériques impropres pour l’application envisagée ici. Si vous n’en trouvez pas, essayez eBay où j’ai trouvé à bon compte le poste de la fig. 8. À défaut de gamme des grandes ondes, les ondes moyennes (PO ou MW) conviennent généralement aussi, certainement si les flancs du signal à détecter sont assez raides. Essayez...

désormais de récepteur universel pour détecter les coupures de câbles cachés.
Injecteur de signal
Il est facile de construire un générateur de signal modulé en amplitude destiné à une radio sur la gamme GO. Un petit microcontrôleur classique et quelques lignes de code suffiraient. Mais comme nous avons affaire à une technologie analogique, une solution analogique s’impose. Avec le prince des circuits intégrés, le temporisateur 555 ?
Si vous voulez un signal modulé en amplitude, il faut en faut deux : un pour la BF, un pour la HF. Autrement dit, un 556 qui est un double 555. Ce serait trop simple, hélas, autant le 555 que le 556 présentent l’inconvénient d’une tension d’alimentation de 5 V et d’un courant pas négligeable. C’est peu propice à une alimentation par batterie. Le 556 existe dans une variante CMOS. Le circuit intégré TLC556 fonctionne dès 2 V de tension de service et peut donc être alimenté par deux piles AA ou AAA, ou par une pile bouton au lithium de type CR3032.
C’est pourquoi on retrouve ce circuit au cœur de l’injecteur de signal universel de la figure 9. Grâce à R1 et C2, le temporisateur 1 (IC1A) produit un signal carré à 465 Hz, soit un demi-ton au-dessus du LA du diapason (qui est aussi la fréquence de la tonalité d’une ligne téléphonique classique). Ensuite, un signal carré à 185 kHz, modulé en amplitude à 465 Hz et fixé par R2 et C4, est créé via l’entrée de réinitialisation de IC2A. Le potentiomètre P1 permet de régler l’amplitude du signal de telle sorte que l’on puisse le recevoir avec la radio. La résistance R3 sert de protection contre les courts-circuits.
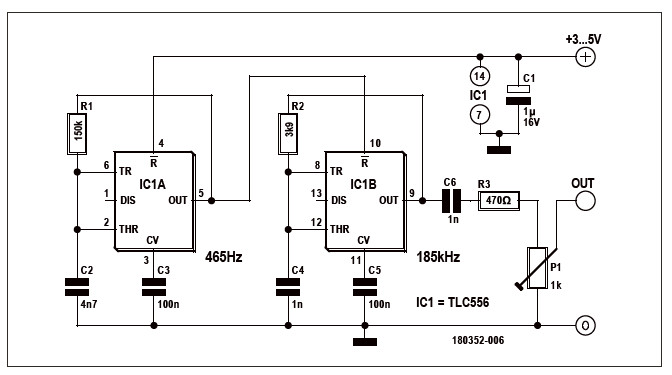
Il fournit un signal GO (185 kHz) modulé en amplitude à 465 Hz.
Les valeurs des composants ne sont pas strictement définies. La troisième ou la cinquième harmonique du temporisateur 2 devrait toujours avoir une amplitude suffisante pour pouvoir être reçue par un radio à ondes moyennes à proximité. Si vous avez la malchance d’habiter à proximité d’émetteurs puissants dans la gamme des 185 kHz, vous pourrez facilement choisir d’autres fréquences à l’aide de R2, avec f = 0,725 / (R2 × C4).
(180352-04 – version française : Xavier Pfaff)
Elektor est réputé pour la qualité de son contenu. En voulez-vous davantage ?
► Abonnez-vous maintenant au magazine Elektor et ne manquez plus jamais ni aucun de ces articles précieux ni aucun de ces projets géniaux.
Discussion (1 commentaire(s))