
Éclairage à commande radar: comment éclairer automatiquement un escalier en détectant une présence humaine
sur

Les solutions de détection de présence commandés par des capteurs de mouvement à infrarouge (PIR) sont omniprésents, mais elles ne détectent pas les corps stationnaires. Ce projet de bricolage contrôlé par radar est une alternative pratique. Suivez-nous si vous souhaitez utiliser un radar pour contrôler les lumières d'un escalier sombre.
Module radar HLK-LD2410
Vous connaissez certainement ces systèmes d'éclairage automatiques commandés par des détecteurs de mouvement à infrarouge (PIR). Ils s'allument lorsque vous passez devant et s'éteignent automatiquement une fois le mouvement disparu. Aussi pratiques soient-ils, ces détecteurs ont leur propre autonomie, ce qui les amène parfois à se comporter de manière un peu bizarre. Avec l'introduction de détecteurs de présence peu coûteux à base de radars, il est désormais possible de résoudre certains des problèmes liés aux capteurs PIR. Les détecteurs radar détectent une présence réelle même lorsque vous ne bougez pas, ce qui permet de garder la lumière allumée, par exemple, lorsque vous lisez dans les toilettes. Comme il s'agit d'un radar, il est à l'abri de fausses détections positives dues, par exemple, à des conditions de luminosité changeantes, à une abeille ou à de l'air chaud en mouvement.
Le capteur HLK-LD2410 est un module de détection de présence humaine à haute sensibilité. Il fonctionne dans la bande de longueurs d'onde de 1,2 cm (24 GHz) pour les services d'amateurs, les satellites d'amateurs, la radiolocalisation et l'exploration terrestre par satellite, loin de la bande Wi-Fi de 2,4 GHz, très active. Développé par Hi-Link Electronics, le module permet la détection d'une présence humaine physique pour les systèmes domotiques. Son principe de fonctionnement repose sur un radar à ondes continues modulées en fréquence (FMCW) qui permet de détecter les corps humains en mouvement ou immobiles.
La théorie des radars FMCW en bref
Le radar repose sur deux principes de fonctionnement. Premièrement, il utilise l'effet Doppler pour détecter les objets. Un signal en ondes continues (CW) est transmis, puis réfléchi par des matériaux conducteurs comme du métal ou de l'eau, et donc aussi par le corps humain. Lorsque l'objet réfléchissant (la cible) est en mouvement, la longueur d'onde du signal réfléchi (et donc sa fréquence) change proportionnellement à la vitesse de la cible. C'est ce que l'on appelle l'effet Doppler. Nous le connaissons tous grâce au son des voitures et des trains qui passent. Le son est plus aigu lorsque le véhicule se rapproche de vous et plus grave lorsqu'il s'éloigne.
Il est possible d'effectuer la mesure de la distance d'une cible avec un radar CW en ajoutant une modulation de fréquence (FM). Lorsque la fréquence du signal est balayée linéairement vers le haut (ou vers le bas), le signal réfléchi reçu n'a pas la même fréquence instantanée que le signal émis, car il est retardé. Les deux fréquences sont légèrement différentes et cette différence est proportionnelle à la distance entre l'émetteur et la cible. Toutefois, comme il existe également un effet Doppler, cette méthode ne fonctionne avec précision que pour des objets statiques ou se déplaçant lentement.
Toute la complexité de l'explication donnée ici est ramenée à une sortie numérique unique à l'intérieur du module HLK-LD2410 pour indiquer l'état de la cible détectée. La sortie est au niveau haut lorsqu'une personne est détectée, qu'elle soit en mouvement ou non. L'application qui utilise le module radar peut donc rester simple, puisqu'elle n'a à réagir qu'à un état binaire.
Le circuit
L'application décrite dans cet article est un système d'éclairage automatique pour escalier (figure 1). Un détecteur de présence humaine utilisant un radar déclenche la lumière lorsqu'une personne est détectée, et l'éteint dans le cas contraire. En outre, le système ne doit fonctionner que lorsque l'intensité de la lumière ambiante est faible (détection de l'obscurité). Le schéma du circuit est présenté à la figure 2.

Une photorésistance (LDR, R2) sert à détecter l'obscurité. Lorsqu'il fait sombre, la résistance R2 est haute, bien plus que la valeur de R1 + P1, de sorte que la tension sur la grille de IC1 est haute. IC1 se trouve ainsi activé, ce qui a pour effet de placer à l'état bas la grille du MOSFET à canal P T1. T1 commence ainsi à conduire et déclenche MOD1, module convertisseur CC-CC économique. Le module radar MOD2 s'allume également et la détection de la présence humaine est activée. Le circuit est ainsi armé, ce qu'indique le témoin LED1.
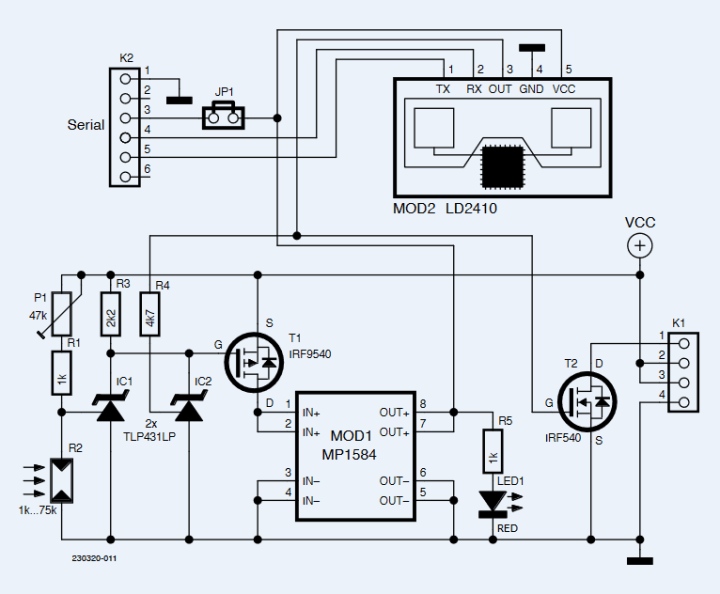
En l'absence de présence humaine, la sortie de MOD2 est basse, le MOSFET à canal N T2 se bloque et la charge (chaîne de LED) n'est pas alimentée. Si une présence humaine se manifeste, la sortie de MOD2 passe à l'état haut et déclenche T2, qui à son tour active la charge. Comment faire plus simple ?
Ambiance discothèque involontaire
Une chose pourrait cependant être améliorée : lorsque la lumière est allumée, la photorésistance ne perçoit plus l'obscurité. La tension sur la grille du circuit intégré IC1 diminue et il se bloque. Le reste du circuit se met hors tension et la lumière s'éteint. Ensuite, la photorésistance détecte l'obscurité et déclenche IC1, etc. Le système commence donc à osciller.
Pour éviter cet effet d'ambiance discothèque, les composants R4 et IC2 ont été ajoutés. IC2 a la même fonction qu'IC1, sauf qu'il est contrôlé par la sortie du module radar au lieu de la photorésistance. IC1 et IC2 ont des sorties à collecteur ouvert et peuvent donc être connectés en parallèle pour piloter T1 dans une configuration de OU logique câblé.
Dès qu'une présence humaine est détectée, le circuit IC2 est activé. Le circuit reste ainsi alimenté de la même manière qu'IC1, même lorsque ce dernier est désactivé. Ainsi, la lumière ne s'éteint que lorsque la présence humaine a disparu. Cette configuration garantit que le circuit possède deux états stables.
Alimentation
Le circuit est destiné à piloter une simple chaîne de LED alimentée en continu sous une tension de 24 V maximum. Cette tension s'applique aux broches 3 (+) et 4 (-) du connecteur K1. La charge est connectée aux broches 2 (+) et 1 (−).
Le module radar fonctionne en 5 V continu. À cet effet, le module MOD1, convertisseur continu-continu MP1584 économique, sert à abaisser la tension d'alimentation de la chaîne de LED à une valeur appropriée pour le module radar. Les modules convertisseurs continu-continu à base de MP1584 sont disponibles en ligne dans de nombreuses variantes, réglables ou avec tension de sortie fixe. Les deux versions sont applicables, même si la tension de sortie n'est pas de 5 V, car il suffit de modifier la valeur d'une résistance pour obtenir une sortie de 5 V. Pour calculer la valeur de la résistance, appliquez l'équation suivante :

Ici, RA est la résistance entre la broche 4 du circuit intégré MP1584 et Vout ; RB est la résistance entre la broche 4 et la masse GND. Sur le module utilisé pour notre prototype, RB avait une valeur de 8,2 kΩ. Comme le module était configuré pour une sortie de 12 V, RA avait une valeur de 115 kΩ. Pour abaisser la sortie à 5 V, RA doit avoir une valeur de 43 kΩ. Sur notre prototype, cela peut se faire en soudant une résistance de 68 kΩ en parallèle à RA. Une autre solution consiste à remplacer RA par une résistance de 39 kΩ en série avec une résistance de 3,9 kΩ (lorsque RB = 8,2 kΩ).
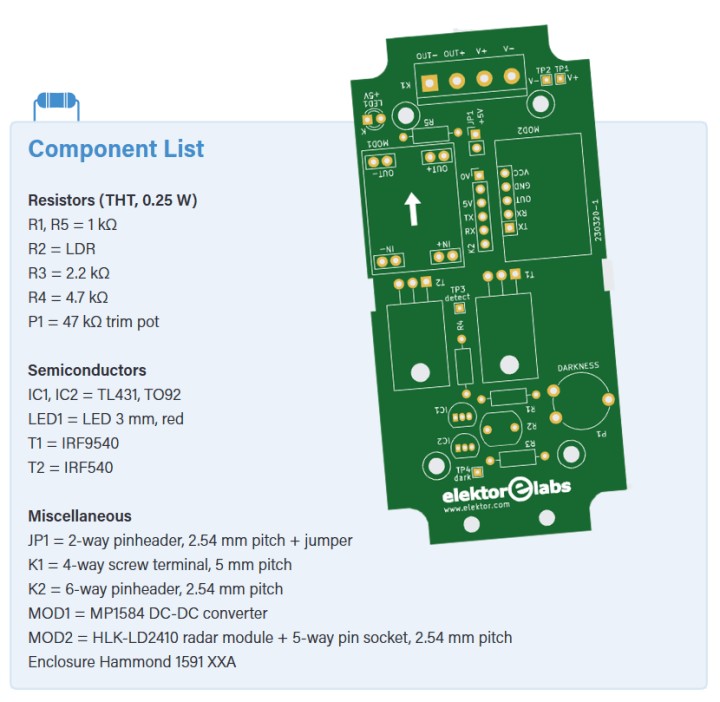
Circuit imprimé
Pour ce projet, le labo d'Elektor a conçu un petit circuit imprimé, avec des points de test destinés à vérifier certains signaux vitaux. La carte s'insère dans un boîtier bon marché en matière plastique (ABS), de référence 1591XXA, proposé par Hammond (figure 3). Le radar offre une bonne pénétration de la coque et ne nécessite pas de trous à l'avant. Le boîtier est ainsi plus esthétique. Bien que la sensibilité soit concentrée devant l'antenne, si vous voulez éviter la détection par l'arrière, protégez cette zone à l'aide d'un film métallique.

Le module radar HLK-LD2410 se présente sous au moins deux formes différentes (figure 4) : une carte de 16 × 22 mm, munie d'une grande barrette à 5 voies au pas de 0,1 pouce, et une carte de 7 × 39 mm longue et étroite, dotée d'un petit connecteur au pas de 0,05 puce. Bien que les deux types puissent être utilisés, leurs connecteurs ne sont pas câblés de la même manière. Les signaux du premier type se présentent dans l'ordre TX, RX, OUT, GND et VCC, alors que le second est ordonné comme suit : OUT, TX, RX, GND et VCC. Le circuit imprimé est câblé pour le premier type, mais il y a de la place pour le second. Le module long et étroit que nous avons commandé est livré avec un câble adaptateur facile à connecter au circuit imprimé. Ainsi, il est possible de mettre en œuvre l'une ou l'autre version de ce module, et ce, sans manipulations excessives.

Le connecteur d'alimentation K1 se monte « en regardant vers le bas », ce qui signifie que les fils de l'alimentation et de l'éclairage passent par-dessus le circuit imprimé jusqu'au côté opposé, le plus court. Les deux trous situés de ce côté peuvent servir à alléger la traction, par exemple avec un collier de serrage (voir figure 3). Cependant, si vous voulez faire les choses autrement, n'hésitez pas.
Configuration du radar
Le module HLK-LD2410 est prêt à l'emploi, mais il peut être configuré via un port série à l'aide d'un programme Windows appelé LD2410 Tooli> . D'où la présence du connecteur K2, port série câblé pour un câble USB-série 3,3 V compatible FTDI.
Le module radar doit bien sûr être alimenté pour pouvoir le configurer, et il y a deux façons de le faire : à l'aide du câble USB-série (JP1 fermé) ou à partir de l'alimentation du circuit (JP1 ouvert). Dans ce dernier cas, il faut s'assurer que la photorésistance est dans l'obscurité, sinon le circuit ne s'allumera pas. Utilisez P1 pour ajuster l'intensité de la lumière (le niveau d'obscurité) qui allume le circuit.
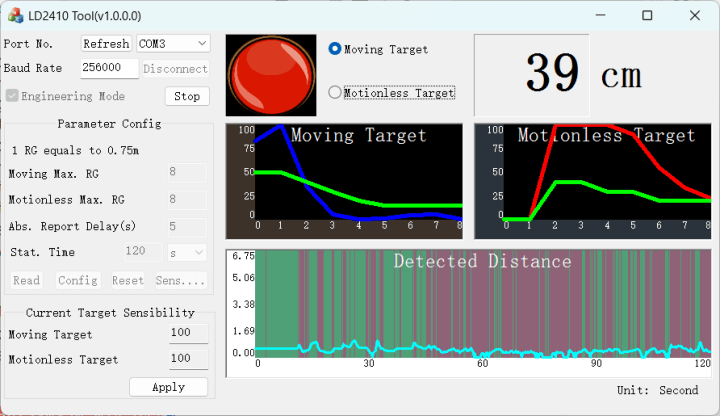
Une fois le module radar alimenté, vous pouvez le configurer. Commencez par vous connecter au module. L'outil offre deux modes principaux. Pour aligner le radar, il est préférable d'activer le mode Engineering (Ingénierie) et de cliquer sur Start (Démarrer) (figure 5). La détection en direct s'affiche alors sous la forme de deux graphiques. À gauche, la cible en mouvement et à droite, la cible immobile. L'ouverture de détection se divise en huit portes de 75 cm chacune. Il est possible de régler la sensibilité de chaque porte de 0 à 100, 100 étant la moins sensible (ce qui signifie « désactiver cette porte pour la détection »). Si la ligne bleue ou rouge atteint ou croise la ligne verte, la broche de sortie passe au niveau haut. Si les niveaux de sensibilité choisis vous satisfont, cliquez sur Config pour enregistrer les paramètres de façon permanente dans le capteur.

Voilà, votre détecteur de présence humaine est opérationnel (figure 6). Une autre idée d'application serait un détecteur de mouvement à lumière rouge / lumière verte (comme dans la série télévisée populaire Squid Game), où une personne doit se trouver à un certain endroit mais n'est pas autorisée à se déplacer. Bonne réalisation!
Questions ou commentaires ?
Envoyez un courrier à l'auteur ginodelek@gmail.com ou contactez Elektor redaction@elektor.fr.
Note de l'éditeur : Cet article (230320-04) paraît dans Elektor Mai /Juin 2024.
Discussion (3 commentaire(s))