Projet n° 45 inverseur de sens de servo
Mais qu’est-ce que c’est que ce bor***l !
Je bouge le levier à gauche et mon modèle
vire à droite ! Je pousse, il monte !
Voici une solution simple à ce problème.
Elle vous évitera bien des jurons.
Mais qu’est-ce que c’est que ce bor***l !
Je bouge le levier à gauche et mon modèle
vire à droite ! Je pousse, il monte !
Voici une solution simple à ce problème.
Elle vous évitera bien des jurons.
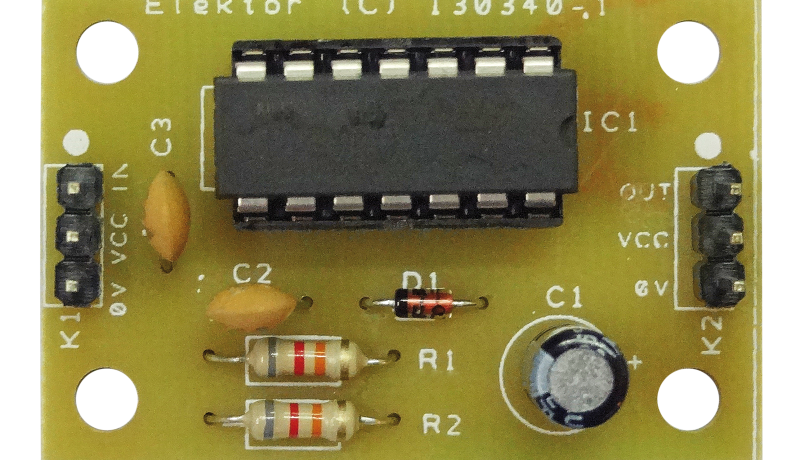
Les servos sont des pièces électromécaniques asservies, cruciales
sur beaucoup de modèles radiocommandés dont ils commandent la direction.
Ils sont généralement commandés par modulation de largeur d’impulsion
(MLI) : une impulsion de 1,5 ms correspond à la position neutre (« tout droit »)
tandis que 1 ms et 2 ms représentent les positions extrêmes. Le sens de rotation
d’un servo peut être inversé simplement, permettant à une impulsion de 1 ms de
produire le même effet qu’une de 2 ms et vice et versa. Tout ce qu’il y a à faire
c’est changer la longueur des impulsions de commande.
Je bouge le levier à gauche et mon modèle
vire à droite ! Je pousse, il monte !
Voici une solution simple à ce problème.
Elle vous évitera bien des jurons.
Les servos sont des pièces électromécaniques asservies, cruciales
sur beaucoup de modèles radiocommandés dont ils commandent la direction.
Ils sont généralement commandés par modulation de largeur d’impulsion
(MLI) : une impulsion de 1,5 ms correspond à la position neutre (« tout droit »)
tandis que 1 ms et 2 ms représentent les positions extrêmes. Le sens de rotation
d’un servo peut être inversé simplement, permettant à une impulsion de 1 ms de
produire le même effet qu’une de 2 ms et vice et versa. Tout ce qu’il y a à faire
c’est changer la longueur des impulsions de commande.
{kind=link}